Detail: SEM Updater
The SEM Updater performs updating for linear Gaussian Structural Equation Models (SEMs). Given an instantiated linear SEM and specified evidence and manipulations, it computes the implied conditional distributions of variables under those conditions.
It is available when the Updater box is connected to an Instantiated Model or Estimator that produces a linear SEM.
SEM Updater
Purpose
Compute conditional means and variances in a linear Gaussian SEM given:
Observed values for some variables (evidence),
Interventions on others (manipulations / do-operations).
Support queries like:
Expected value of Y given X = x,
Expected value of Y under an intervention that sets X = x (often written do(X = x)),
Conditional distributions of subsets of variables.
Inputs and setup
Input model: a linear SEM instantiated by an Estimator or Instantiated Model box:
Contains path coefficients, error variances, and possibly intercepts.
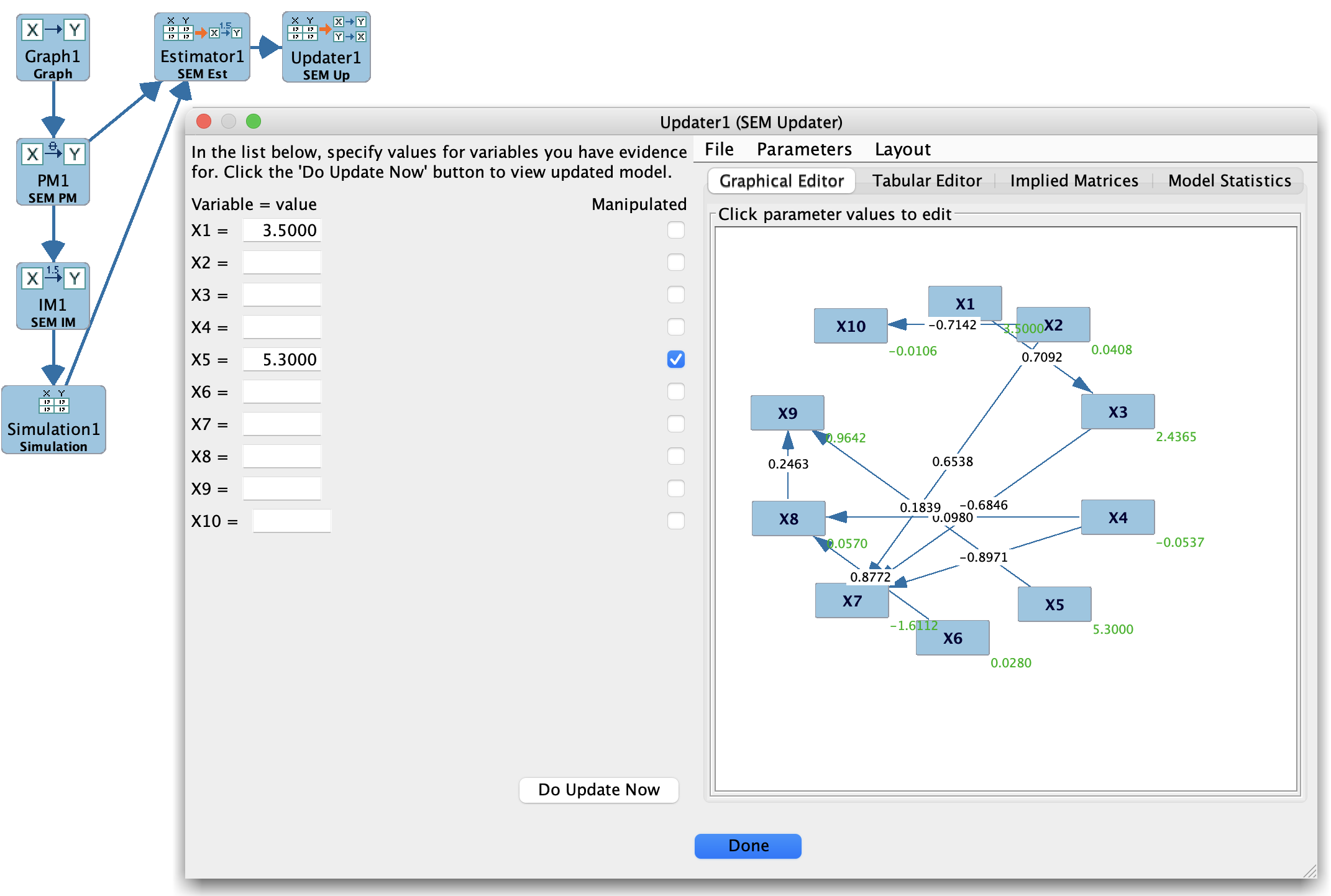
User-specified information:
Evidence: observed values on some variables.
Manipulations: variables to be intervened upon (do-operations), typically removing their parents and fixing them at specified values.
These are set in the Updater box via fields for variable values and manipulation flags.
How it works (conceptually)
For a linear Gaussian SEM, the joint distribution over all variables is a multivariate normal distribution. The SEM implies a particular mean vector (often written mu) and covariance matrix (often written Sigma) for this multivariate normal.
The SEM Updater:
Constructs (or uses) the implied mean vector and covariance matrix from the SEM structure and parameters.
Incorporates manipulations (interventions) by:
Modifying the structural graph (removing incoming edges into manipulated variables),
Recomputing the implied mean vector and covariance matrix under the intervention.
Incorporates evidence by conditioning:
Conceptually, the variables are partitioned into observed variables X (with values x) and variables Y of interest. The updater uses the standard multivariate normal conditioning formulas to obtain the conditional mean and covariance of Y given X = x.
Reports conditional means and variances (and sometimes covariances) for variables of interest.
You do not need to know or enter the conditioning formulas yourself; they are handled internally by the SEM Updater.
Output
Conditional summaries:
Means of variables given evidence and/or manipulations.
Variances (and possibly covariances) under the same conditions.
These can be interpreted as:
Predictions under observation (what you expect to see given evidence),
Effects of interventions in a linear Gaussian setting (what you expect to see when variables are set by do-operations).
The underlying SEM parameters remain fixed; the Updater computes conditional distributions “on top” of them.
Tips
Use the SEM Updater whenever you are working with a linear SEM and want to ask “what-if” questions about interventions and observations.
Make sure the SEM is:
Properly estimated (no severe Heywood cases),
Reasonably well-fitting; otherwise, conditional predictions may be misleading.
When comparing conditional predictions under different scenarios:
Duplicate the Updater configuration and change only the evidence/manipulation values,
Keep the underlying SEM fixed.